MISTEL DOBERMANS
TEN GENERATIONS OF
BREEDER OWNER HANDLED CHAMPIONS
The following is an article describing Doberman
movement or gait
written by Bob Vandiver and
published in the Doberman Digest
The Doberman was originally bred for protection and
accompaniment during Herr Doberman’s rounds as tax
collector.
Through the history, the Doberman has been
used for many tasks including delivering messages
during war, patrolling military objectives, police
work, search and rescue, guide dogs for disabled,
and in ring sports including conformation,
obedience, agility, tracking, and schutzhund. These
varied tasks require that the Doberman use many
gaits, depending on the task at hand.
Some breeds have natural gaits that are specific to
them.
Examples include the hackney gait of the Minpin, the
flying trot of the German Shepherd, or the amble of
the Old English Sheepdog.
These gaits are characteristic of the breed.
The Doberman has been said to be a galloping breed,
and it is most comfortable at that gait.
However, upon observation of many Dobermans
in a natural environment, you will find that the
breed is comfortable in several gaits, including the
walk, trot, canter, and double suspended gallop.
The breed uses any and all of these gaits
depending on the need.
For practical purposes, the Doberman is evaluated at
the trot in the show ring (as are most other
breeds).
For this reason, this discussion will be
limited to that gait.
Overview
The most efficient working dogs are those that can
work the longest at their appointed duties with the
least amount of effort.
The efficiently moving dog travels in a
straight line with the minimum amount of energy.
It requires that there be no bouncing,
rolling, or yaw (twisting on the vertical axis).
Length of stride of the dog is an important
consideration.
For a given dog, the fewer steps required to
cover a given distance, the less energy is required.
In most dogs, the rear provides the major propulsive
force for moving.
The back and loin provide the rigidity to
transmit the force from the rear to the front.
The front carries about 60% of the weight and
provides some additional propulsion.
The Doberman Standard describes the gait as “Free,
balanced and vigorous with good reach in the
forequarters and good driving power in the
hindquarters.
When trotting, there is strong rear action
drive.
Each rear leg moves in line with the foreleg on the
same side.
Rear and front legs are thrown neither in nor
out. Back remains strong and firm.
When moving at the fast trot, a properly
built dog will single track.”
Evaluating the side gait
Pictured below is a side view of the Doberman at a
trot.
The graphic was taken from The Doberman Pinscher
Illustrated1 issued in 2006 a booklet
prepared by the Doberman Pinscher Club of America
(DPCA).
We will begin the discussion with the first
line of the movement description “Free, balanced and
vigorous with good reach in the forequarters and
good driving power in the hindquarters.” Note the
front reach and the rear extension in Figure 1 below

Figure 1
Using the same graphic we can draw a triangle over
the dog as seen in Figure 2 below to visualize
proper leg position.

Figure 2
The front reach of the dog should result in a front
extension approximately below the nose.
The rear extension should balance the front
with an equal kickback.
As you can see, the triangle’s apex is just
above the point at which the front foot and rear
foot exchange positions (about the center of the
dog’s topline).
The angle that forms the front reach is about
equal to the angle that forms the rear extension.
This is balanced movement and illustrates
correct Doberman side gait.
When evaluating gait, it is important to consider
the elevation of the feet.
If a dog lifts front or rear feet excessively
above the ground, he is wasting energy.
The closer the feet remain to the ground, the
less energy is required.
There is an old dog term called “daisy
cutting” that describes an efficiently moving dog as
one whose feet are raised just enough to cover the
rough ground, just cutting the tops of the daisies
as he moves.
To study the side gait, follow the footsteps as the
dog moves.
At the trot, the dog is continuously moving
over the legs.
The front foot strikes the ground slightly
behind the nose and immediately moves rearward.
As it moves it passes under the front
assembly to the point at which it lifts from the
ground to move forward again.
The leg in the rear on the opposite side is
simultaneously following the reverse path.
It is leaving its extended position and
moving forward under the rear assembly, and
extending to about the midpoint of the dog’s body.
Just under the center of the topline, the
front foot lifts to move forward for the next step.
The rear foot steps into nearly the same
track that the front foot vacates.
There is a very slight forward motion of the
entire dog’s body when both front and rear feet are
off the ground simultaneously. This allows the rear
foot to assume the same position as the vacating
front foot.
(Otherwise the rear foot would interfere with
the front foot.)
This slight forward motion is what Rachel
Page Elliot2 describes as the “spring” in
the gait.
It contributes to the look of “free and
balanced” motion as described in the standard. Some
characterize it as gliding or floating.
This slight time “in flight” is not visible
to the naked eye, but it has been demonstrated in
Elliot’s scientific studies2 and it can
be seen in the smoothness of the gait.
Since the rear provides for most of the propelling
motion, it is important to note its action.
The rear leg motion can be thought of as a
3-phase action.
In the first phase the leg reaches under the
dog to strike the ground at about the same point
that the front foot is vacating.
The upper leg and hip muscles are doing most
of the work.
In the second phase, the leg swings backward
under the dog’s hip assembly and uses mostly the
upper leg assembly for its power. In the third
phase, the rear leg continues from under the hip
assembly rearward.
A combination of the upper leg and the
extension of the rear pastern provide the propelling
force.
Near the end of this phase, the rear pastern kicks
back to provide most of the final propulsion.
The end of the last phase tells us why the rear
pastern (a seemingly small part of the leg) is so
important in the overall movement of the dog.
Comparing a dog’s anatomy to a human’s is
hardly exact, but the human’s upper and lower thigh
is analogous to the dog’s upper and lower thigh.
The ankle is analogous to the dog’s hock, and
the human foot is used similarly to the dog’s rear
pastern.
Toward the end of the step, the human pushes
off with the foot. The same is true for the dog with
the rear pastern.
You can imagine how you would move if your
feet were confined by tape such that you could not
flex your foot.
You couldn’t provide that final push for your
forward propulsion.
The same is true of the dog.
This illustrates the importance of the rear
pastern power at a trot
…
human or canine.
The standard states “Back remains strong and firm.”
This simply requires that the dog’s back be
reasonably rigid and strong, and not bounce due to
looseness, length, or incorrect proportions or
angulation.The topline of the Doberman should remain
level and straight. A Doberman that bounces
over the withers has a serious handicap.
Let’s try to quantify the affects of a
bouncing front due to a combination of structural
deviations.
If a male Doberman has a stride of 28 inches at the
trot (2263 steps per mile), and the withers move up
and down 1/2 inch with each step, then the dog’s
front will expend the energy equivalent of lifting
it 94 feet while traveling that mile.
Since the dog’s front is about 60 % of the
dog’s total weight, then the dog would have expended
60 % of the energy to raise his entire body the 94
feet.
In other words, after trotting for a mile, the dog
will have also expended the energy equivalent to
climbing a 6-story building (60% of the 94 feet).
The extra work expended in an hour of trotting
(typically at 5 miles per hour) would be the
equivalent of climbing 30 stories.
After a days work, this dog will be far more
exhausted than one that moves without bounce over
the withers.
Moving on with side gait, the head carriage should
be extended somewhat above the horizontal as shown
in figure 1.
This is a natural head carriage for the
Doberman at the trot. The Doberman should not move
with its head extended straight ahead as if it were
a draft animal or with the head up and back as is
typical in a Poodle.
Evaluating the down-and-back gait
The down-and-back gait is described in the standard
as “Each rear leg moves in line with the foreleg on
the same side.
Rear and front legs are thrown neither in nor
out. …
When moving at the fast trot, a properly built dog
will single track.” Figure 3 below shows the
correct movement down and back for a Doberman.
Figure 4 has lines added to emphasize that
the leg forms a straight-line column and moves in
the same plane as the opposite leg on the same side
and converge toward a centerline under the dog.




Figure 32
Figure 4
The importance of moving with straight legs can be
appreciated if we compare the dog’s legs with human
legs.
It is truly a rare human endurance athlete that does
not have very straight legs.
Knock-knees or bowed legs do not allow the
forces to travel directly though the joints.
Rather, they cause a lateral force in the
joints that will damage the joints over a period of
time, and cause the athlete to move inefficiently.
The same reasoning applies to dogs that do
not maintain straight legs throughout the travel.
The standard calls for the dog to single track at a
fast trot.
The purpose of the single track is for
balance and conservation of energy.
Consider a dog that doesn’t single track at
the trot.
Such a dog would have a tendency to have a
body roll.
This can be illustrated by Figure 5 below:

Figure 5
Although some Dobermans fail to converge properly,
they do not have an exaggerated rolling or twisting
of the body that is seen on the wide set dogs.
However, the tendency is still there for the
dog to move similarly to the Bulldog.
It is not an efficient gait for a working
dog.
When judging the Doberman, convergence is an
important point.
The dog must also move in a straight line with a
straight body to be an efficient mover.
Some structural faults will cause a dog to
move with a yaw or in a “side-winding” or “crabbing”
gait.
This takes away from our desire to have the dog move
in a straight line, with minimum bounce, roll, or
yaw.
Although the dog will appear to move in a straight
line, it will not move with its body (spine) in line
with the direction of motion.
How structure affects movement
At a show, the judge does a static evaluation to
consider head, color, coat, condition, temperament,
structure, etc..
The structural considerations in this
evaluation can often predict how a dog will move,
but there are reasons why the conclusions reached
from the static structural evaluation do not match
how the dog really moves.
The structure and the musculature of the dog control
the movement of the dog.
If the dog is in proper physical condition
(weight, muscle tone, and ligament and tendon
strength), then its musculature is not a
consideration.
The dog will then move as well as the
structure will allow.
However,
lack of proper musculature and conditioning can make
an otherwise correctly structured dog move poorly.
This is particularly noticeable in front
movement. The shoulders are not connected to the
rest of the structure through joints, but rather
they are connected through soft tissue (muscles,
tendons, etc.).
It is entirely possible for a dog to move
incorrectly through lack of conditioning rather than
through fault of structure.
Most judges agree that observing the movement of the
dog is ultimately the best way to determine if the
static evaluation is correct. To move
correctly the dog must be structured correctly.
The correct Doberman structure taken from
The Doberman Pinscher Illustrated1 is
illustrated in Figure 6 below:
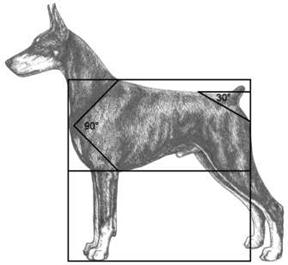
Figure 6
This structure exhibits the proportions and angles
that define a correct Doberman Pinscher. Deviations
from this structure will cause deviations from the
ideal movement.
The following highlights how certain structural
deviations affect movement of the Doberman.
The first structural issue is the very important
requisite that the Doberman be square.
Two variations can occur.
The dog is too long in body, or the dog is
too short in body.
Unlike breeds whose bodies are longer than
tall, a square dog must really be built to
the correct proportions and angles if it is to move
correctly.
There is simply no extra room to accommodate
any interference between front and rear legs on a
square dog.
Consider a square dog with an over-angulated rear
relative to the front.
The excess rear angulation causes an
over-reach in the rear so that his rear feet
interfere with the front feet.
A square dog must find a way to compensate
for the imbalance so that his legs do not interfere
under his body.
He can compensate by moving with his rear
feet to one side of the front feet, or he can move
wide in the rear so his rear feet don’t strike the
front feet.
A longer bodied dog offers more room under his body,
so his feet will not interfere. The extra room
forgives faults that would be readily apparent in a
square dog.
The longer bodied unbalanced dog may appear
to move correctly, but he has two faults, imbalance
from front to rear and too long in body.
A Doberman with leg length longer than body
depth will have the same problem with interference
under the body.
There will not be enough room under the dog
to place his feet without interference, because the
long legs “overstep” what his body length can
accommodate.
His back feet strike the front feet before
the front foot can get out of the way.
His compensation is similar to the dog that
is overangulated in rear relative to front.
Typical movement for both of these deviations in
structure is a dog that “side-winds” or “crabs” when
he moves.
He moves with his rear to one side of his
front, so that his rear feet strike the ground to
one side of his front feet.
This gives him the appearance of moving
sideways or moving like a crab.
Another means to compensate for this structural
deviation is the dog that moves wider in the rear
than in the front.
This occurs in Dobermans occasionally, but
the breed is much more likely to side-wind than to
move wide in rear.
Continuing with the subject of front structural
deviations, consider shoulder angulation.
The standard calls for the shoulder to be at
45 degrees from the vertical.
There is an old adage that says that a dog
“can’t reach past his shoulders”.
This means that when the dog extends his leg
for the step forward, the angle of the leg will be
controlled by the angle of the shoulder.
A dog with a steeper shoulder than in Figure 6, say
35 degrees from the vertical rather than 45 degrees,
cannot reach as far forward.
One result is a dog that takes shorter steps
both front and rear. Think about a person whose
normal stride is shortened by 10%.
That person suddenly has to take 10% more
steps to cover the same distance … an uncomfortable
gait.
The same applies to the dog.
For a given dog, the longer the natural
stride, the more efficient the gait.
Although the front and rear move at the same speed
with the same number of steps, it’s possible that
the stride lengths are not equal.
This can happen if the dog is unbalanced with
more rear angulation than front angulation (a common
occurrence in Dobermans).
In this case his front stride is shorter than
his rear stride.
To compensate, he must lift his front higher
than normal to keep it in the air longer, while his
rear takes longer strides.
The front is taking shorter strides, but is
airborne for a short time.
This structure causes the dog’s front to
bounce up and down and is a very inefficient gait as
was quantified earlier.
The correct Doberman front as viewed from the
front is shown in Figure 7.

Figure 7




Figure 8
In addition, the pinched-front deviation will cause
the dog to throw the front legs from side-to-side,
wasting even more energy. The dog that elbows out
will typically throw the front legs outwards as he
moves … another inefficient gait.
Before leaving the front, it is important to
consider the feet and pasterns.
The standard describes them as “Pasterns firm
and almost perpendicular to the ground. Dewclaws may
be removed. Feet well arched, compact, and catlike,
turning neither in nor out.”


Figure 9
Figure 10
Having completed the front structural deviations,
now consider the rear.
Rear movement is easier to judge than front
movement because the legs are joined to the rest of
the structure through joints, not through soft
tissue alone.
Rear movement is more influenced by
structure, and not as greatly influenced by
conditioning.
Also the movement of the rear is less complex
than that of the front, because the shoulder moves
up and down and rotates through its normal movement.
The rear does not have this complexity.
The standard describes the rear as follows:
“The angulation of the hindquarters balances that of
the forequarters.
Hip Bone- falls away from spinal column at an
angle of about 30 degrees, producing a slightly
rounded, well filled-out croup.
Figure 11
Since the Doberman is described in the
standard under General Characteristics as “Compactly
built, muscular and powerful, for great endurance
and speed.” one would expect to see a hock that is
moderate in length to achieve the desired balance of
endurance and speed.
A long rear pastern is normally associated
with sprint type animals such as rabbits or
antelopes … good for short bursts of high speed, but
not endurance.
A short rear pastern is normally associated
with a draft animal … slow but powerful and
enduring, but not capable of great speed.
Since the Doberman is neither of these we
must reach a balance, so a moderate length of
hock-to-foot is desired.
One good way to understand correct rear structure is
to study typical deviations.
Some deviations are shown in Figure 12 and
represent from left to right an overangulated rear,
a straight rear with a flat croup, and an
overangulated rear with sickle hocks and a steep
croup.
.
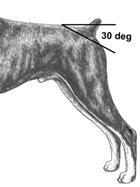
Figure 12
The middle graphic is straight in rear with a flat
croup.
The expected result is a restricted rear motion.
The dog can’t reach under far enough.
His straight stifle and flat croup won’t
allow the rear to extend (similar to a straight
front not allowing correct reach).
The straight hock joint doesn’t provide
enough power to follow through for the rear pastern
“push-off”
The overangulated rear and sickle hocks are
particularly troubling.
The same problems occur as the overangulated
dog above, but with the sickle hocks the rear
pastern can’t straighten.
A dog with these faults will normally move
with his rear under him, never extending with power.
The steep croup will also limit rear
extension.
A combination of faults that are seen from time to
time in Dobermans is an overangulated rear with a
flat croup.
This dog will appear to move correctly
because the flat croup compensates for the
overangulated rear and allows it to reach back.
It appears to be correct, when in fact there
are two deviations in the dog, rather than none.
The standard also states “Viewed from the rear, the
legs are straight, parallel to each other, and wide
enough apart to fit in with a properly built body.
Dewclaws, if any, are generally removed. Cat feet-
as on front legs, turning neither in nor out.”
Again, the standard and the Illustrated Standard
graphics do an excellent job of describing the
desired structure of the rear when viewed from
behind.

Figure 13
Other typical deviations are shown in Figure 14
below and have the same common problem that we saw
in the front deviations.
These legs are not straight as required even
when standing in the normal position (the left being
cow-hocked and the right being open hocked).


Figure 14
Summary
In the beginning, this article explained the correct
side gait and the correct out-and-back movement for
the Doberman Pinscher. The intent was to instill a
vision of the correct movement of the Doberman in
the reader’s mind. Later, the article describes the
mechanics of gait and discussed how certain
structural traits affect it.
Structural faults were used to describe
incorrect movement.
Using faults helps to understand how the dog
should not move.
Although it is important to understand faults and
how they affect gait, the reader must be careful not
to fall into “fault judging” as the primary means of
evaluating movement. Good judges first recognize
merits, and then evaluate the dog’s movement based
on balancing the virtues against faults. To
emphasize the importance of positive judging, below
you will find a repeat of the illustrations of
correct movement along with a repeat of a
description of correct gait as described in the
standard.
Hopefully the reader will focus on these as
the most important element of this paper.
FINALLY, HERE IS THE CORRECT DOBERMAN MOVEMENT



Home Puppies-for-sale Tips-On-Buying-a Pup About Us Champions Breeding-Practices Raising-Puppies Other-Info
Site designed and maintained by RLVandiver